Why CNC Programmers Find It Challenging to Master Robotic Machining Programming
CNC (Computer Numerical Control) programming and robotic machining programming are two pillars of modern manufacturing that often intersect but differ in significant ways. CNC programmers, who are accustomed to working with machine tools for precise, controlled processes, may find programming robotic machining unexpectedly complex.
This article explores the reasons why CNC programmers face challenges when transitioning to programming industrial robots for machining tasks.
1. Differences in Programming Approaches and Languages
CNC machines typically use G-code, a standardized language that specifies a sequence of actions for cutting, drilling, or milling. The process is linear, with straightforward commands executed in a fixed order. CNC programming logic is well-defined, following a consistent pattern that relies heavily on Cartesian coordinates.
Robotic machining, on the other hand, involves programming robots using specialized, often proprietary languages such as KRL (KUKA), RAPID (ABB), or FANUC’s TP programming. These languages are more versatile but also more complex, requiring programmers to adapt to new syntax and concepts. Additionally, robot programming incorporates more dynamic movement paths, requiring a deeper understanding of variables, conditional logic, and more sophisticated algorithms.
2. Complex Multi-Axis Movements
CNC machines, even those with multi-axis capabilities, generally operate within a fixed set of coordinated axes. CNC programming typically involves defining a clear toolpath with predictable, precise movements.
Industrial robots used for machining can have six or more degrees of freedom, enabling them to move more flexibly and replicate human arm movements. This freedom comes with the challenge of handling non-linear and non-Cartesian motion. Programming such complex, multi-directional movements requires understanding not only simple toolpaths but also robot kinematics and inverse kinematics. CNC programmers need to think beyond traditional X, Y, and Z coordinates and visualize how a tool needs to be oriented and positioned in 3D space throughout its path.

3. Trajectory Planning and Tool Orientation
In CNC programming, defining a toolpath means plotting specific points for the cutting tool and setting the feed rate and spindle speed. The emphasis is on achieving precise cuts at controlled angles.
Robotic machining requires more than just a toolpath. Programmers need to ensure smooth transitions between points to avoid jerky or abrupt motions that could damage the workpiece or the tool. Maintaining proper tool orientation is crucial for effective material removal and surface finish quality. This requires trajectory planning that takes into account not only where the tool is going but how it is oriented at every step along the way. Adjusting to this level of control and precision can be a significant leap for CNC programmers.
4. Dynamic Interaction with the Work Environment
CNC machines operate within enclosed and controlled environments where the workpiece is secured, and variables like vibration and tool wear are managed within predictable limits.
Robots, however, often work in more open and less predictable spaces, especially when used for large-scale machining or in applications that require them to move around different workstations. The ability to handle environmental variables—such as changes in material, positioning discrepancies, or interactions with other systems—means robotic programming must include the capacity for real-time adaptation. This dynamic element introduces a level of complexity that CNC programmers may not be used to handling.

5. Safety Considerations
Safety protocols for CNC machines are generally straightforward, with enclosed work areas and predefined emergency stop mechanisms. CNC programming typically involves minimal interaction with live environments while the machine is running.
Robotic machining, on the other hand, involves significant safety considerations, particularly in collaborative setups where robots and humans share workspace. Programming robots for machining must include the integration of safety features such as collision detection, force feedback sensors, and safe zones. Ensuring that robotic machining complies with safety standards adds a layer of complexity to programming that CNC programmers may not initially be familiar with.
6. Enhanced Simulation and Real-World Testing
CNC programming often involves running simulations in CAM software to verify toolpaths before executing them on the actual machine. While this step is crucial, it is relatively straightforward as CNC machines follow highly predictable paths.
Robotic machining requires more extensive simulation and real-world testing due to the robot’s range of motion and the unpredictability of free-form movements. Simulating a robot’s entire kinematic chain, including potential reach and orientation issues, is more complex than simulating a CNC toolpath. Real-world adjustments may be needed after initial programming to fine-tune the robot’s behavior, making the process more iterative and time-consuming.
7. Understanding Singularities
One of the more technical challenges in robotic machining is dealing with the concept of singularities. Singularities occur when a robot’s joint configuration results in an undefined or infinite solution for movement, causing abrupt and erratic behavior. This is analogous to a mathematical singularity where certain equations break down.
For CNC programmers who are used to predictable, linear movements, understanding and avoiding singularities can be a steep learning curve. Ensuring that the programmed toolpath avoids these problematic joint positions requires a deeper knowledge of robot kinematics and how different arm configurations can impact motion.
8. Integration with External Systems
CNC machines are often standalone units or connected to basic monitoring systems for job scheduling. In contrast, robotic machining requires integration with external systems like vision sensors, conveyors, and other automated equipment.
The need for communication between the robot and external devices requires understanding network protocols, interfacing with sensors, and coordinating data flow. This level of integration demands more advanced knowledge of system architecture, which CNC programmers may need to learn.

9. Diverse Application Range
While CNC programming mainly focuses on subtractive manufacturing methods, such as milling, turning, and drilling, robots are employed for a wide range of machining applications.
Robots can be used for cutting, trimming, grinding, and finishing operations, which each require specific programming techniques and approaches. The broad versatility of robots means that CNC programmers must learn how to adapt their skills for different applications, adding another layer to the learning curve.
Conclusion
The transition from CNC programming to robotic machining programming is not just a shift in tools but a shift in mindset. CNC programmers face challenges such as mastering new programming languages, understanding multi-axis movement, planning complex trajectories, adapting to dynamic environments, and learning how to manage singularities. The integration of safety protocols, extensive simulation needs, and external system communication further complicate this transition.
For CNC programmers looking to expand their skill set into robotic machining, dedicated training, real-world practice, and a willingness to adapt are essential. While the challenges may seem daunting, mastering robotic machining opens up new possibilities for advanced manufacturing and positions programmers at the forefront of technological innovation in the industry.
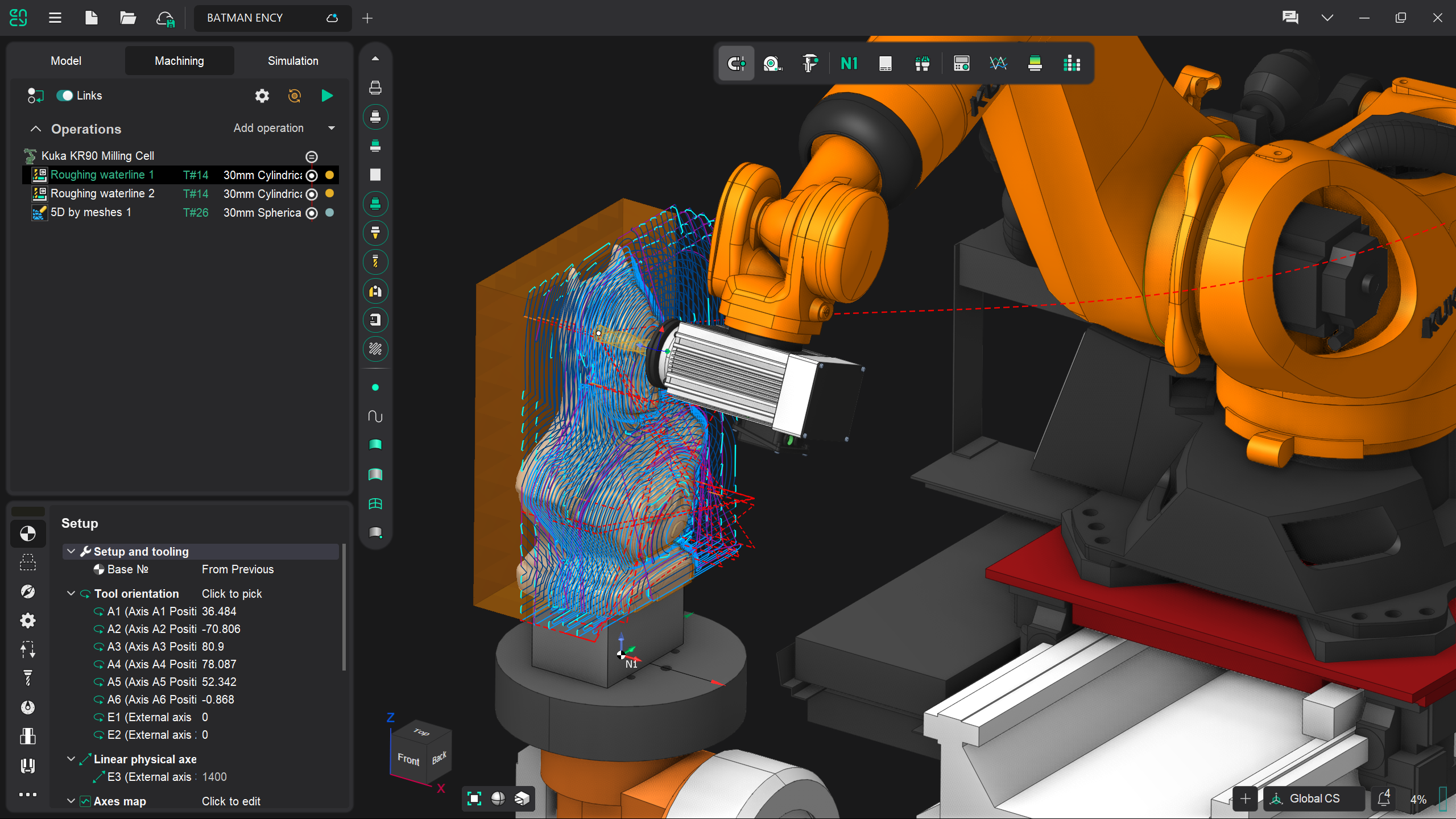
An example of a tool that eases this transition is ENCY, which provides an integrated software environment for programming both CNC machines and industrial robots. By offering a unified interface, ENCY enables programmers to switch seamlessly between CNC and robotic machining, applying familiar techniques while exploring new programming paradigms. This cohesive approach helps reduce the learning curve and promotes more efficient cross-platform programming, allowing users to harness the full potential of their equipment.

Author
No results available
Go beyond CAD/CAM
Back to top