-
Menu
- Go back
- Industries
- Architecture & Construction
- Arts
- Automotosport
- Bridge Structures
- Automotive & Transportation
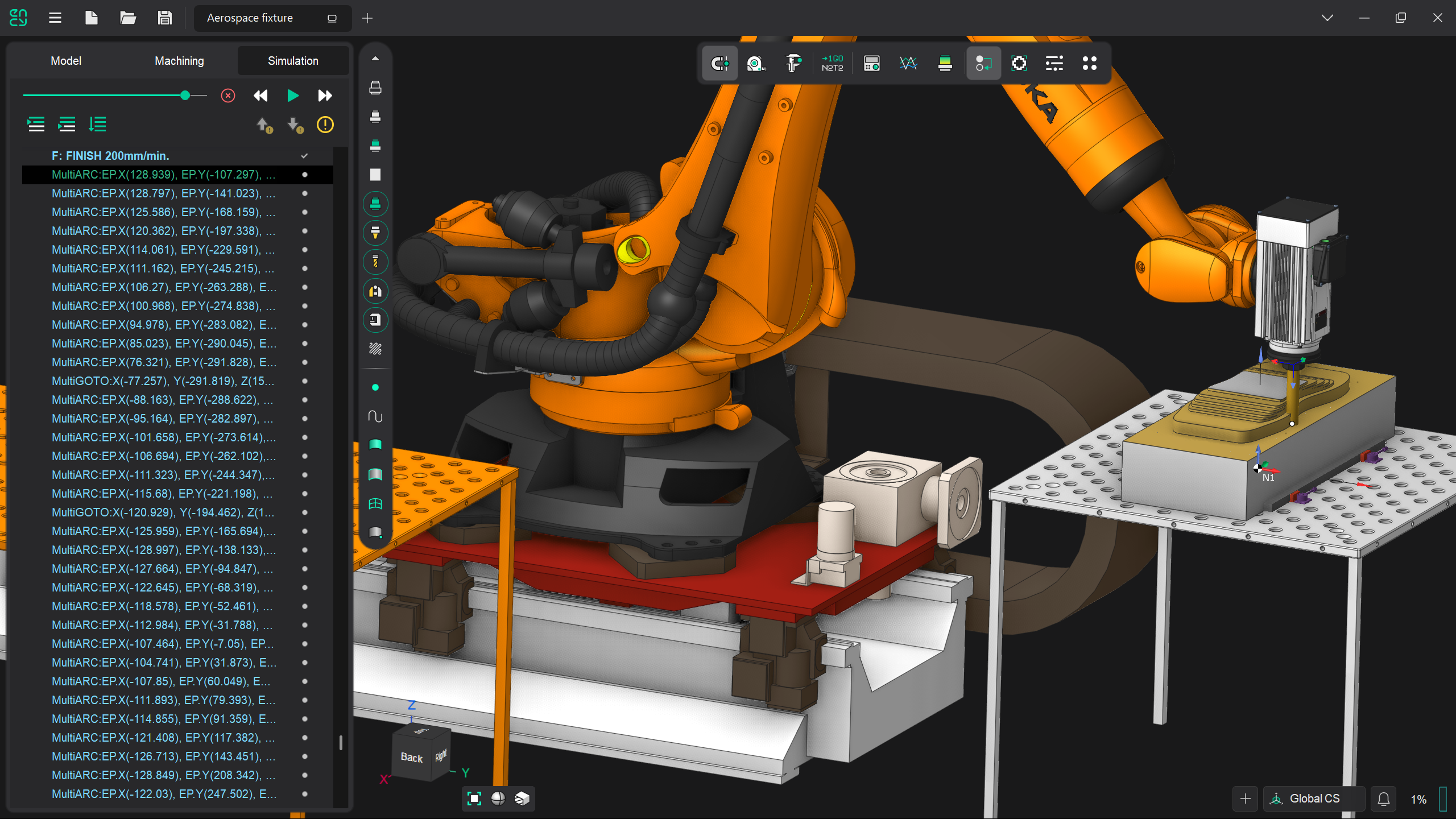
- Aerospace & Aviation
- Watch & Jewelry
- Consumer Products
- Die & Mold
- Education
- Electronics, Computers, Telecom
- Energy, Oil & Gas, Power Generation
- Film Production & Entertainment
- Heavy Equipment & Mining
- Industrial Machinery & Equipment
- Job Shop
- Machine Tool Industry
- Medical & Dental
- Shipbuilding
- Woodworking
- Go back
- Support
- ENCY User Manual
- ENCY Robot User Manual
- ENCY Tuner User Manual
- ENCY Hyper User Manual
- MachineMaker for Robots
- MachineMaker for CNC Machines
- Postprocessor Generator User Manual
- API Documentation
- Changelog
- Interpreter development guide
-
Menu